Introduction
By detecting, aggregating, and instantly transmitting data wirelessly to clients, wireless sensor networks (WSN) have a substantial potential for monitoring maritime environments. Inadvertently, this has led to the development of an innovative type of wireless sensor technology known as underwater wireless sensor networks (UWSNs) (1). Characteristic UWSN is comprised of numerous sensor nodules fastened to the ocean base that are wirelessly interlinked with one or more underwater gateways. Information is generally communicated inside this sensor network from the base to the sea external station via multi-hop pathways. Underwater gateways are the precise nodules armed with both perpendicular and parallel transceivers. The primary one is utilized for sending instructions and arrangement information to the sensor nodules and acquiring the collected information from them. The succeeding one is utilized for relaying the supervised information to the sea’s external base. Contrasting to narrow water, perpendicular communication is typically essential for a distant in deep water for achieving information transfer to the external base. Audio and radio modems commonly arm this last one. The audio communication is utilized for performing manifold equivalent communications for gathering information by sensor nodules. Where radio communication typically created by satellite is engaged for relaying collected information to the seaside sink.
A scalable UWSN offers an encouraging answer for discovering and detecting aqueous atmospheres for various purposes, which operate below numerous significant limitations. On one hand, these environments are unsuitable for human presence due to the variable underwater activities, high water pressure, and large areas of water that are the main objectives for unmanned survey. On the other hand, limited survey is healthier compared to remote detection because of the extra accurate outcomes, as remote detection technologies may not be capable of finding suit- able information concerning the actions occurring in the unbalanced underwater environment.
Underwater wireless sensor networks (UWSNs)
Underwater wireless sensor network is a network utilized for performing supervising of charges throughout precise area; this is armed by smart sensors and automobiles that are improved to connect supportively via wireless connections. External sink regains the information through sensor nodules. The sink nodule possesses a transceiver that can regulate audio signals obtained by underwater nodules. Transceiver also has the ability to transmit and acquire far-reaching radio frequency indications for communication with an external base. For a given purpose, the acquired data are used locally or connected to another network (2) Figure 1 is a diagram of UWSNs.

Figure 1. Outline of the UWSN atmosphere.
Network planning includes conventional UWSNs planned from Akyildiz et al. (3) and instantaneous UWSN planning in the shape of Internet of Underwater Things projected from Domingo (4). UWSNs include nodules that are employable on the exterior and under water. Each nodule should link to the others in its network and switch data with the base post. Using audio, electromagnetic, or optical wave technologies, broadcasting information is one of the communication strategies used in sensor networks. Because of its weakening properties in water, audio interaction is a highly common and widely used approach among these types of methods. Combination and the transformation of energy into heat in water are the causes of the poor transmission factor. Meanwhile, audio signals operate at low frequencies that enable their transmission and acquisition across vast distances.
Requirements of UWSNs
This segment gives the vital necessities of UWSNs Figure 2 represents these requirements.

Figure 2. Necessities of underwater wireless sensor networks.
Longevity
Network period is an important condition of UWSNs. This possesses an important influence on the price, period, conservation duties, and execution of underwater sensor nodules. This is vital for expanding the network period, particularly for mobile sensor nodule processes.
Consequently, firmware possesses an imperative duty in warranting an efficient manner of hardware characteristics like sleep types, allowing stoppages for replacing surveying, and being comfortable for setting up. Furthermore, the routing procedure and positioning of nodules possesses a massive part in governing energy utilization. This directs to an important quantity of study that operates on growth and assessment procedures.
Accessibility
Every sensor nodule connects to all others within a communication extent positioned in the area. Communication stretch is another vital necessity for UWSN that impact bulk of nodules, placement viability, and network price of besieged supervising part. There are two interaction methods for UWSNs: audio and visual communication. Underwater audio wireless communication is an extremely utilized technology as it is reachable and needs communication over vast spaces. Nevertheless, audio waves still possess numerous inadequacies, containing smattering, extreme interruption due to the low broadcast speeds, great weakening, a small bandwidth, and contrary influences on underwater beings. To increase the volume of audio transmission, orbital angular momentum is being explored as a replacement for multiplexing freedom for encrypting data onto vortex beams (5). Because of the limitations of audio communication, another method is to utilize optical waves. Conferring to Saeed et al. (6), the present study on underwater optical communications focuses on increasing information speed and broadcast stretch. Optical waves possess the benefits of advanced information speed, small dormancy, and energy efficacy at the expense of reduced communication limits.
Complexity
The requirement for sensor nodule positioning at the site is also vital for UWSN. Therefore, a difficult issue must be deemed before establishing networking phases that comprise physical feature, firmware, and network arrangement of nodule location. Furthermore, routing protocol choice and calculating difficulty aid in vigorously recognizing routes with no extra data or previous data regarding other nodules. Separately from that, nodule algorithm difficulty is an alternative feature that must be counted; meanwhile, it affects the energy optimization of nodules. Local nodes’ energy utilization is based on their respective computational difficulty and broadcast power features. Underwater audio station difficulties like multipath, Doppler change, substantial weakening, and excessive interruption are also necessities that influence the functioning of node localization procedures.
Security and privacy
Underwater wireless sensor network is connected with safety and confidentiality features that connect to sensor nodule connectivity, harmonization, and information transaction duties. The active characteristics of underwater atmosphere and their atmospheres depict the network of numerous indulgences and malevolent outbreaks. This is essential for the networks to create faith before every node can strongly link to the network to let communication take place for information interchange. This is necessary to learn what stage of safety because of the enlarged computational burden and the quantity of conveyed information, which uses extra energy within the network.
Environmental sustainability
The disposition of communication technologies in UWSN is mandatory to deem the influence on atmosphere and nature. Codarin et al. (7) stated that biota is affected by ambient and boat sounds that can guide pressure and increase extermination danger. Furthermore, an aquatic atmosphere with intensifying sound can produce behavior variations, population spreading, and audible damage to fish types.
Applications
Underwater wireless sensor network technology can replace conventional methods by providing real-time monitoring, an aground system for controlling underwater applications considerably, and enhanced appliances for information logging. UWSN usage often falls under one of four categories: scientific, industrial, military, or safety. Sensor nodules are used in the military to track enemy movement and locate them. This may be used to keep an eye on harbors and ports, handle boundary observation, spot underwater mines, and detect enemy submarines. Sensor nodules can detect aquatic atmospheres in the event of natural disasters by conducting seismic supervision in advance of the disaster. A wide range of applications necessitates rapid advancements in standards and technology to enable and enhance the creation of new functionalities. Despite the fact that there are many different functions, this section reviews recent developments in the field of UWSN functions that assist in technical, industrial, and security and disaster prevention measures.
Literature review
Underwater sensor networks are drawing the attention of commerce and academia (8, 9). On one hand, this allows an extensive variety of marine functions, and correspondingly, contrary ecological circumstances produce a variety of challenges for underwater interaction and networking. Nodule flexibility and scarce disposition can generate difficulty for underwater sensor networks. Because of incessant nodule activities with water currents, there may not be a tenacious way from the foundation to a target. So, an UWSN can be observed as a partly linked network, and the conventional directing procedures advanced for terrestrial sensor networks are typically not applied for these atmospheres. Because of this sporadic connectivity, packets are released when no routes make it to the end.
In Yadav and Vinay (10), the authors’ focus has been on perfect bunching for UWSN that is compatible with all wave-based wave communication protocols of FSO (free space optics), audio, and electromagnetics. Additionally, they suggested a degenerate prototype that contrasted with the existing degenerate prototype of energy for communication built on audio for sensor nodules in free space and communication supported by electromagnetic waves. In particular, the authors contrasted the applicability of the four previously mentioned underwater interaction strategies based on energy usage and perfect bunching.
In Awan et al. (11), UWSNs are used to learn about ecological aspects, locations, media access control, routing methods, and communication repercussions of packet dimensions. They compared the advantages and disadvantages of current techniques in order to identify novel learning instructions for further growth in UWSNs. In Huang et al. (12), the authors generated a routing procedure to concentrate on the subjects in UWSN, and in this arrangement, the authors used a fuzzy logic implication structure to determine the suitability of sensors for moving packets to the destination. An evaluation of underwater network procedures until 2,000 can be found in Sozer et al. (13). Numerous routing procedures are projected for UWSNs. It is advised to use the vector- based forwarding (VBF) protocol to resolve the issue of high error probability in solid networks. Here, a pipe- like circuit-switching routing concept is projected from the beginning to the conclusion, and all floods are discharged through this pipe. This technique will result in fewer retransmissions, thus increasing energy efficacy for VBF.
In Pompili et al. (14), a two-stage flexible routing answer for continuing supervisory uses with a notion of unified scheduling of network routings and information routes has been projected. Afterward, the same authors proposed a procedure that can control both interruption susceptible and interruption lenient uses. In this procedure, a cross-layer method is utilized to generate communication between the routing purposes and underwater features.
In Xie et al. (15), the authors provided an impression of bunched- founded topology, in which every nodule in a group will connect with the gateway nodule; each node of the identical group will connect with the gateway using one expectation. According to the authors, full-duplex modems are used for this type of communication. Every network routing is the responsibility of the gateway nodule, which also guides route discovery by using investigative communications with its neighbors and stores the route data to prevent faults from being revealed in subsequent communications. A modification of dynamic source routing, which was originally developed for terrestrial networks, is predicted in Carlson et al. (16), where the authors discussed position-aware source routing for active acoustic underwater vehicle (AUV) net- works. It utilizes the time-division multiple access (TDMA) method for numerous approaches and recognized TDMA frame controls for computing varieties based on broadcast interruption, and then routes are decided by utilizing these changes.
In thesis (17) for function-pointed networks, a chain- based communication mechanism in cylindrical UWSNs is envisaged. In this procedure, three structures are shown. In the first routing structure, a routing procedure founded on four chains is projected that utilizes the split and cap- tor methods. The chains are interrelated and utilized for achieving the finest feasible outcomes for the broadcast of information. Likewise, in the second routing structure, the network is separated into two chains on the source of θ. Chains are interrelated and used for selecting the total optimal path. The last one is a routing structure based on a single chain, where every nodule links to its adjacent neighbor and henceforth recognizes local best achievable route.
Underwater sensor networks are expected to use less energy and dis- tribute information more evenly, thanks to the autonomous underwater vehicle assisted routing protocol (AURP), which is anticipated in Yoon et al. (18). In this procedure, manifold AUVs are utilized for minimalizing whole information broadcast. AUVs gather information by sensor nodule and advance that to the sink. AURP utilizes varied communication networks. Delay-Sensitive EEDBR.
(DSEEDBR), Delay-Sensitive DBR (DSDBR), and Delay- Sensitive AMCTD (DSAMCTD) are projected in Javaid et al. (19) for time-significant uses. DSDBR utilizes an avaricious method, with routing based on depth threshold (dth) source and holding time (Ht). Routing in DSEEDBR and DSAMCTD is also achieved by computing Ht and difference in dth.
Proposed work
The proposed research work is given below.
Routing techniques
Underwater sensor networks contain important amount of sensor nodules organized at diverse deepness throughout the entire area of interest. The nodules positioned at the sea/ocean base cannot connect with the exterior floats precisely; therefore, multi-hop communication is desired, which is later helped by the routing algorithm. An effective routing structure must deliver the ideal route between source and sink.
Planning a routing procedure is dependent on network requirements as well as the desired stage of accuracy and optimization, which additionally hangs on supply availability. Procedures are categorized into the subsequent groups:
1. Energy-based routing: An Energy Optimized Path Unaware Layered Routing Protocol is used here. The entire network is divided into levels with every nodule in a level permitted to converse to sink via an equal quantity of hops. In communication via multihopping, the option of relay nodules is founded on the latter’s space from the sink nodule, i.e., nodule, nearer to the sink and substantially distant from the resource, turns out to be the succeeding hop. The lifespan of system upsurges by permitting non- dynamic nodules to slumber. Nonetheless, in this process, the portable kind of nodules is not contemplated, so deeming it inappropriate for instantaneous underwater uses. QELAR, an alternative energy- based procedure that has been conversed, is precisely appropriate for portable UWSNs. Nevertheless, this necessitates the nodules to save a stack of information in stock because of the Q-Learning algorithm it utilizes; so, it is not feasible to use QELAR on a large scale of UWSNs.
2. Geographic information-based routing: The position- based routing method is also used in numerous procedures that require the continuous updating of the position of the neighboring nodules in order to transfer information. There are several different techniques that are discussed, including Hop-by- Hop Dynamic Addressing Based (H2-DAB) routing, Depth-Based Routing (DBR), and Delay Sensitive Depth-Based Routing (DSDBR).
CoDBR (cooperative depth-based routing) protocol
Cooperative depth-based routing (CoDBR) protocol for usage in urgent situations. The current profoundly based routing methods use collaboration at the network level, increasing network scale and dependability.
Cooperative depth-based routing chooses forwarder nodule alongside two relays based on least depth that supportively advance information to the end. This upsurges the amount of effective information distribution to end because, in the event of link failure, at least one link is proficient of transporting information effectively to the end. Furthermore, even if there is no connection botch, it still tolerates high bit error rate, which later variety can aid to alleviate.
The relays are designated based on depth information. This is a localization-unrestricted procedure, and only depth data are utilized for steering packets. In CoDBR, every nodule interchanges depth data amid every sensor nodule at the beginning of network. The source nodule builds the registering of neighbors in their neighboring catalog. Source nodule chooses a short-depth neighbor from their neighbor catalog. The choice of relay in CoDBR is based on least-depth neighbor. This structure contains two stages: path set up and information communication. In the first stage, the source nodule inspects the neighborhood of sink and chooses two relays of short depth to obligingly advance information to sink. To reach the broadcast stage of information, data are communicated via a recognized route. CoDBR attains high dependability and reliability at the expense of high end-to-end interruption (20).
This is a multi-hop-based routing procedure in which energy-stable routing significantly reduces the weight on the sensor nodules to direct/accept information. In the proposed procedure, nodules are not necessary to possess data on whole network to route packets; they only need neighboring energy for choice crafting for the next hop.
In the projected architecture, nodules are separated into three types as follows.
• Mediator Nodes (MN).
• Hop Nodes (HN).
• Generator Nodes (GN).
Generator Node (GN) is a normal sensor nodule that senses incident.
Mediator Node (MN) is a nodule that is accessible over a broadcast stretch of GN with fewer hop count.
Hop Node (HN) is a nodule in stretch of broadcast with fewer hop count of MN from GN.
Process
First, GN desires information from MN about HN, in which ever sensor nodules contain neighboring nodules.
Data such as remaining energy is obtained via subsequent means.
• Agent to approximate routing. Agent to monitor neighbor.
• Agent approximate advancing information.
• Agent to approximate depth of nodule.
Assumption: Sink to the surface of water.
From overhead agents, every sensor nodule gathers information about HM, and that is contrasted with further nodule information to discover an appropriate HN entrant. Each MN replies to the appeal by sending over- head information to GN. AER (agent to estimate routing) is accountable for local table (LT). As sink directs a transmission packet to every nodule, AER calculates the hop count for distinct nodules, which sink stocks in a local chart in a routing database that stocks two charts.
LT contains subsequent data, such as neighbor nodule id, hop count, deepness, space, and remaining energy.
Routing table covers preceding nodule, following nodule, source nodule, and TTL.
CoDBR system contains two stages:
(1) Path setup stage.
(2) Data transmission stage.
(3) Path setup stage: In this scenario, each source nodule creates a multiple-hop route to the sink nodule. The source nodule checks to see if it is close to the sink nodule before choosing the sink as its next hop. Source also selects two relays based on the bottommost depth to obediently advance information to sink. The source nodule chooses its next hop end based on the nearest nodule with the lowest depth among those in its broadcast range if this is not close to the sink. In the meantime, the network is thin and nodules are arbitrarily positioned, so source nodule eyes for adjacent relays. Neighbor relays are indicated on the foundation with the lowest depth when there are more than two people. The path preparation stage’s specifics are provided by the algorithm.
(4) Data transmission stage: Information is transmitted from source to sink during this stage via the route that was established during route setup. Information is sent from the source nodule to the relays and each hop. Relays retransmit the identical information utilizing an intensified and advanced system. AF is utilized as path loss, declining sound, and an indication that desires to be augmented. When relays convey information to the destination, they do not combine their personal detected information with the information of the source information. They only advance the augmented form of information directed from the source nodule. Their personal information is conveyed during their private turn.
Path setup algorithm
S = Total no. of nodes
for i = 1 to S do
SINKREACHED = false
while not (SINKREACHED) do
if Ri > 0 and NextHop = SINK then
Find neighbors N for i
Sort N in ascending order Depth wise
if N> = 2 then
Make 1st neighbor as relay 1
Make 2nd neighbor as relay 2
SINKREACHED = true
else if N< = 1 then
Make 1st neighbor as relay 1
SINKREACHED = true
else
break
else if
else if Ri > 0 and not (NextHop = SINK) then
Find neighbors N for i
Sort N in ascending order Depth wise
if N> = 3 then
Make 1st neighbor as NextHop
Make 2nd neighbor as relay 1
Make 3rd neighbor as relay 2
else if N< = 2 then
Make 1st neighbor as Nexthop
Make 2nd neighbor as relay 1
else if N< = 1 then
Make 1st neighbor as relay Nexthop
else
break
end if
end if Ri < 0 then
break
end if
end while
end for
CEEDBR (Cooperative Energy Efficient Depth-based Routing) protocol
The chief notion of CEEDBR is to control the amount of information-advancing nodules so that energy consumption can be decreased (21). In the CEEDBR, among a group of nodules, the mass is allocated to the nodules founded on depth and remaining energy. A nodule will possess extreme mass if it contains the lowermost depth and maximum energy outstanding amid neighboring nodules. The nodule with extreme mass is a contender for advancing information. This is also significant to test whether the nodule is active or not.
Protocol details
This unit enlarges the whole functioning of CEEDBR. This is a localization-free protocol, and nodules are prepared with depth sensors only, so it is significant to swap depth information among local neighbors. For this reason, every nodule swaps its depth data amid neighboring nodules at to discern the depth information of its nearby nodules, a method for transmitting information from source to destination is identified, as shown in Figure 3. An algorithm exists.
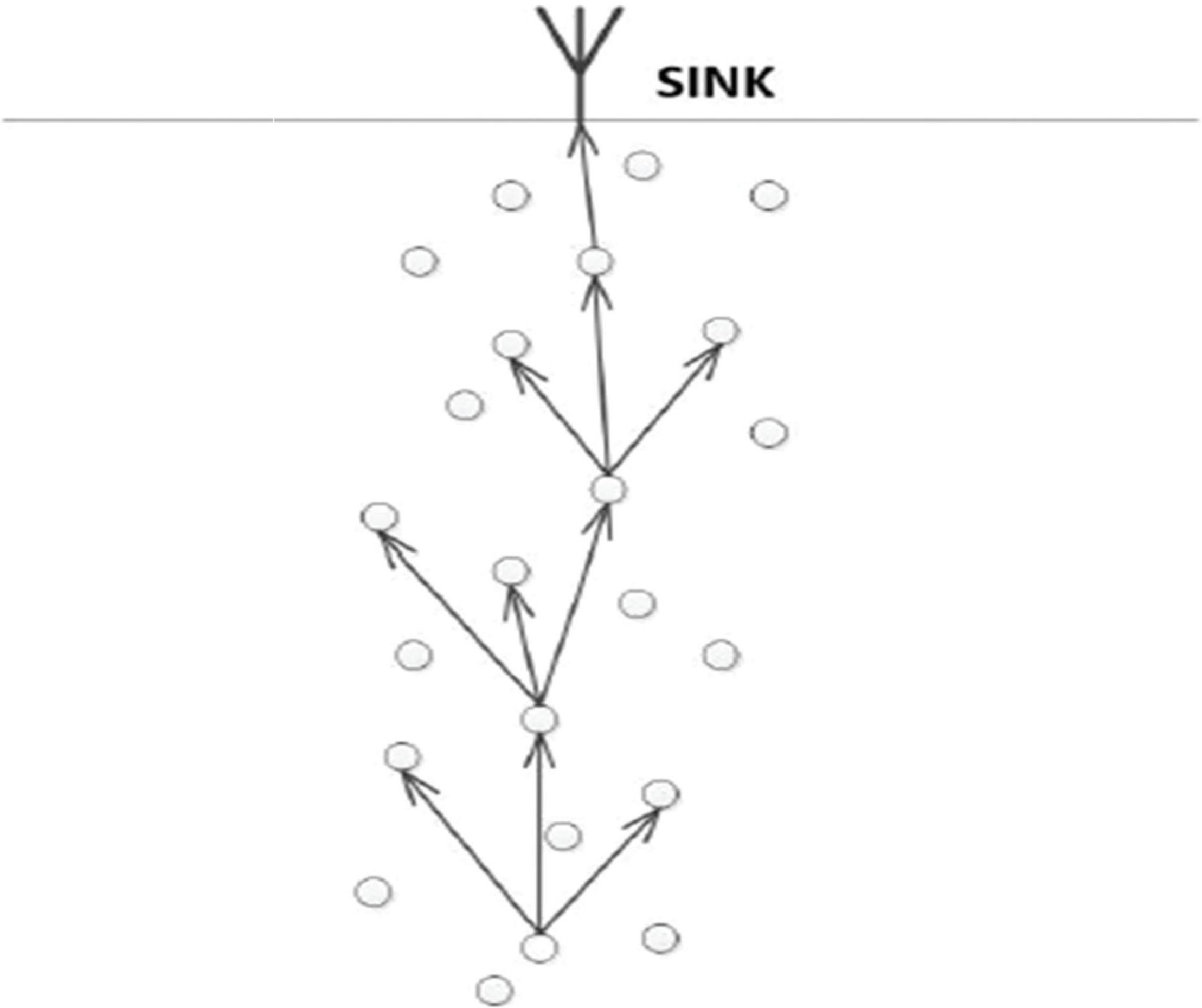
Figure 3. Data transmission path in CEEDBR.
Cooperative Energy Efficient Depth-based Routing procedures contain the following stages:
(1) Optimal forwarder node group choice.
(2) Forwarding node choice.
Optimal forwarder node group choice
Here, the source nodule thanks its neighbors. Nodules that are neighbors are those whose depth is smaller than the depth of the source nodule. The number of neighboring nodules is also limited by a global constraint of depth threshold (dth). This limits the information that may be obtained to nodules that are deeper than dth. The depth difference is defined as the difference between the depths of the source and surrounding nodules. Amid recognized neighbors, the source nodule classifies a group of nodules called an ideal forwarder nodule group. These are named ideal forwarders as they are deemed the finest applicants to obtain information from the source nodule and advance it to the end. In the neighbor recognition stage, this is significant to distinguish whether the source is inside the span of any sink or not. When there is a sink nearby, the information is brought straight to the sink. This gets forwarded to its subsequent hop-forwarder nodule group if there is no sink in the span of the source nodule. Lastly, one nodule out of this nodule group is nominated for broadcasting information to the following hop-forwarder nodule group.
The choice standards for forwarder nodule group are based on important notion of DBR and EEDBR. Nodules with extraordinary bulk dependent on depth and remaining energy are the problem for CEEDBR. On request, the optimal forwarder nodule group’s volume can be adjusted (21).
Forwarding node choice
Here, the source initially classifies a group of nodules in their broadcast extent as an ideal forwarder nodule group. Every nodule in this group obtained the detected data transmitted by the source nodule. In the context of CEEDBR, amid the forwarder nodule group, a mass is allocated to nodules based upon depth and remaining energy. Nodule will possess supreme mass if it possesses the smallest depth and maximum remaining energy amid adjacent nodules. Nodule with maximum weight is a contender for advancing information. This is also significant to test whether nodule is active or not. Information is advanced in this manner from one forwarder nodule cluster to the next until it goes to the sink. The data forwarding algorithm is given below:
1: N = Total number of nodes
2: Sink-inrange = false
3: RE = Residual energy of a node
4: Sink = Transmission range sink
5: Neighbor [j] = All neighbors of node i
6: while (sink-inrange = = true) do
7: for each node j € N do
8: Distance [j] = Euclidean (j, sink)
9: if Re[j]>0 and Distance [j] < Distance [j + 1] then
10: Neighbor (j) selects as a forwarder
11: else
12: Neighbor (j + 1) selects as a forwarder
13: end if
14: end for
15: end while
Results
The experimental results of CoDBR and CEEDBR in UWSNs based applications are shown in Figure 4.

Figure 4. (top) CoDBR network lifetime and (bottom) CEEDBR network lifetime.
Five transmitting nodes are required to operate at full capacity. As the number of transmitting nodes declines, the organization’s lifespan significantly improves. It can likewise be seen that the node kick-the-bucket rate in the event of CoDBR and CEEDBR is lower compared with DBR and EEDBR. All four sinks are present at the surface. The greatest rounds are contrasted with CoDBR and CEEDBR, which are around 6,000 rounds.
Network lifetime is the period of time until all of the organization’s nodes run out of power. Alive nodes constantly monitor the number of nodes with enough power left for data transmission. When an organization has a fair amount of energy usage, its lifespan increases. This suggests that extensive part of the organization is alive for a greater part of the time. The increase in network lifetime is due to the fact that fewer nodes are engaged with information sending, so absolute energy utilization is lower.
Conclusion and discussion
Improving network lifetime to improve the functioning of UWSN is a significant and exciting job. The type of under- water atmosphere makes it extremely costly to substitute batteries for sensor nodes. Therefore, it is crucial to develop energy-efficient routing techniques for underwater sensor networks. Therefore, in this paper, we discussed CoDBR and CEEDBR procedures and came to the conclusion that the operation is improved compared to the current depth- based routing procedures in terms of network period, energy efficacy, packet interruption, and throughput.
Author contributions
All authors listed have made a substantial, direct, and intellectual contribution to the work, and approved it for publication.
References
1. Fattah S, Gani A, Ahmedy I, Idris MYI, Targio Hashem IA. A survey on underwater wireless sensor networks: requirements, taxonomy, recent advances, and open research challenges. Sensors. (2020) 20:5393.
2. Maindalkar AA, Ansari SM. Design of Robotic Fish for Aquatic Environment Monitoring. Int. J. Comput. Appl. (2015) 117:31–4.
3. Akyildiz IF, Pompili D, Melodia T. Underwater acoustic sensor networks: Research challenges. Ad Hoc Netw. (2005) 3:257–79.
4. Domingo MC. An overview of the internet of underwater things. J Netw Comput Appl. (2012) 35:1879–90.
5. Jiang X, Shi C, Wang Y, Smalley J, Cheng J, Zhang X. Nonresonant metasurface for fast decoding in acoustic communications. Phys. Rev. Appl. (2020) 13:014014.
6. Saeed N, Celik A, Al-Naffouri TY, Alouini MS. Underwater optical wireless communications, networking, and localization: a survey. Ad Hoc Netw. (2019) 94:101935.
7. Codarin A, Wysocki LE, Ladich F, Picciulin M. Effects of ambient and boat noise on hearing and communication in three fish species living in a marine protected area (Miramare. Italy). Mar. Pollut. Bull. (2009) 58:1880–7.
8. Cui J-H, Jiejun K, Mario G, Shengli Z. Challenges: building scalable mobile underwater wireless sensor networks for aquatic applications. IEEE Netw. (2006) 20:12–8.
9. Heidemann J, Wei Y, Wills J, Syed A, Yuan L. Research challenges and applications for underwater sensor networking. Proceedings of the IEEE Wireless Communications and Networking Conference, 2006. WCNC 2006. Las Vegas, NV: (2006).
10. Yadav S, Vinay K. Optimal clustering in under- water wireless sensor networks: acoustic, EM and FSO communication compliant technique. IEEE Access. (2017) 5:12761–76.
11. Awan KM, Shah PA, Iqbal K, Gillani S, Ahmad W, Nam Y. Underwater wireless sensor networks: A review of recent issues and challenges. Wireless Commun Mobile Comput. (2019) 2019:6470359.
12. Huang CJ, Wang YW, Shen HY, Hu KW, Hsu PA, Chang TY. A direction-sensitive routing protocol for underwater wireless sensor networks. In: Chien BC, Hong TP, Chen SM, Ali M editors. International Conference on Industrial, Engineering and Other Applications of Applied Intelligent Systems. Berlin: Springer (2009). p. 419–28.
13. Sozer EM, Stojanovic M, Proakis JG. Underwater Acoustic Networks. IEEE J Ocean Eng. (2000) 25:72–83.
14. Pompili D, Melodia T, Akyildiz IF. A resilient routing algorithm for long-term applications in underwater sensor networks. Proceedings of Mediterranean Ad Hoc Networking Workshop. Lipari: (2006).
15. Xie G, Gibson J, Diaz-Gonzalez L. Incorporating realistic acoustic propagation models in simulation of underwater acoustic networks: a statistical approach. Oceans. (2006) 2006.
16. Carlson EA, Beaujean PP, An E. Location-aware routing protocol for underwater acoustic networks. Oceans. (2006) 2006.
17. Javaid N, Jafri MR, Khan ZA, Alrajeh N, Imran M, Vasilakos A. Chain-based communication in cylindrical underwater wireless sensor networks. Sensors. (2015) 15:3625–49.
18. Yoon S, Azad AK, Oh H, Kim S. AURP: an AUV-aided underwater routing protocol for underwater acoustic sensor networks. Sensors. (2012) 12:1827–45.
19. Javaid J, Jafri MR, Ahmed S, Jamil M, Khan ZA, Qasim U, et al. Delay-sensitive routing schemes for underwater acoustic sensor networks. Int J Distrib Sens Netw. (2015) 2015:532676.
20. Nasir H, Javaid N, Ashraf H, Manzoor S, Khan ZA, Qasim U, et al. CoDBR: cooperative depth based routing for underwater wireless sensor networks. Proceedings of the 2014 Ninth International Conference on Broadband and Wireless Computing, Communication and Applications. Guangdong: (2014).